DXR-RTX Path Tracer Project Host Code
Information
Links to series
- DXR Path Tracer Introduction
- DXR Path Tracer Usage
- DXR Path Tracer Host-Side Explanation
- DXR Path Tracer HLSL Explanation
What do you mean by host side?
The host side of the project is working with C++ and DXR/DirectX12 API and managing the communication with the GPU and CPU and resources. This post will describe how the DXR Path Tracer project is setup as I worked mainly on the host side of the code base.
Direct Love/Pain
DirectX 12 is awesome. A programmer can actually manage the resources to communicate between the CPU and GPU and describe the resource in any way he/she prefers
This allows for tons of performance and removes overhead for having the driver manage the resource
However, on the other hand, DirectX 12 can make you pull your hair out because either you’re missing a parameter or missing a call. The API is verrrrrrrrrrryyyyyyyyyyy explicit.
Experience with DirectX 12
My knowledge of Directx 12 is no where near that of a seasoned graphics programmer. I have only pretty used opengl and cuda before, but I can say I did learn a lot about the API in these last four weeks I’ve worked on the project :)
I will try to explain the host code at a high level to the best of my ability and if anyone has any questions, I’ll be happy to answer. If anyone has any suggestions, that would be awesome!
If you want great tutorials for an intro to DirectX 12, take a look here:
Root Signature/Parameters and Heap descriptor layout

Some of these images are from 3DGEP Tutorial and Braynzar Tutorial, so shoutout to them for the some of the best tutorials on directx12 and image
In DirectX12, one needs to create a root signature that describes the parameters that are passed to the hlsl shader code, which is where the magic happens.
The root signture is sort of like a function signature in C/C++, which defines the parameters that are passed to the function.
So, how does one allocate these so called “parameters” and hook them up with the root signature? One uses a descriptor heap
~~I’m sorta skipping myself ahead here, but here is the image of how the path tracer’s resources are allocated and I will explain what is happening after

You probably want to open the image by right clicking it and selecting open in new tab to get a clearer picture :)
In the image, the root signature contains two entries. One is a descriptor table and the other is an array of samplers, which points to different samplers to grab values from a texture
A descriptor table (in this case), is describing all the parameters (resources) that are going to passed to the hlsl shader code.


Each entry in the descriptor table is a descriptor range, which contains the number of entries in the descriptor heap that should be bound to the entry and what space the entry should be in (why spaces are used is explained in the HLSL post).
For the project, I have descriptor range entries for vertices, indices, materials, objects, diffuse textures, and normal textures. These ranges point to an entry in the descriptor heap and contain the number of elements from the start of the entry in the descriptor heap. They also describe the type of resource being used.
Next, we have the descriptor heap, which contains handles, which are opaque pointers to the resource, sorta like a FILE, in C, where one should not access the contents, or dereference the object. One should only pass the handle to function calls.
Now, to the resources, which are abstractions that wrap data and can be on the CPU or on the GPU
These resources point to actual data, which could be vertices, textures, materials, etc…, as shown in the image.
Objects are kind of unique here. They provide yet another indirection to the vertex, texture, material resource by having an offset those particular resources. You can see in the hlsl post how the offsets are used.
So, how does hlsl shader part come in?
Well, when the command list sets the root signature and the descriptor table associated with the signature, which essentially binds the root signature with the actual heap table resources and executes the command list, the resources are available in the hlsl code!
So in theory, if one wanted to access the first diffuse texture, it can be done as so:
Texture2D text[] : register(t0, space5);
...
Texture2D first_texture = text[0];
Wow, that was a lot to explain. Hopefully, you get an idea of what was done!
If something is missing or not explained very well, shoot me a message! I’ll be happy to answer.
Acceleration Structures
Initial D, gotta accelerate
Well moving on to more specific API calls to DXR/RTX, which is building the acceleration structures, which is nicely explained in this post by Nvidia
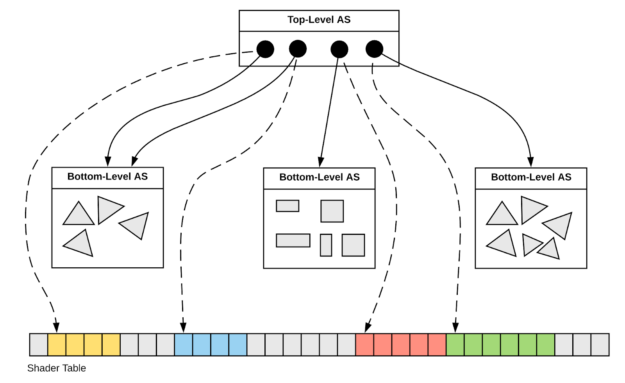
*image taken from the Nvidia post
In the DXR Path tracer, it’s pretty much exactly the same as what is described in the post
For each model, create the bottom level acceleration structure and have a geometry descriptor that points to the vertices and indices resources
*Pseudo-ish code of the source is shown below. The code is not exactly the source, since I want readers to get a general sense of what was done and not read verbose C++ code.
//Geometry that describes the vertices and indices the bottom level acceleration structure will hold
geometryDesc.Type = D3D12_RAYTRACING_GEOMETRY_TYPE_TRIANGLES;
geometryDesc.Triangles.IndexBuffer = indices.resource->GetGPUVirtualAddress();
geometryDesc.Triangles.IndexCount = indices_count;
...
geometryDesc.Triangles.VertexBuffer.StartAddress = vertices.resource->GetGPUVirtualAddress();
geometryDesc.Triangles.VertexCount = vertices_count;
...
//Get PreBuild information
m_dxrDevice->GetRaytracingAccelerationStructurePrebuildInfo(..., &bottom_pre_build_info);
...
//update the descriptor
bottom_acceleration_descriptor.pre_build = bottom_pre_build_info;
//Build the Acceleration Structure with the command list
rtxCmdList->BuildRaytracingAccelerationStructure(&bottom_acceleration_descriptor, ...);Then, for the top level, there are instances, which do the following:
- hold the model transformation matrix (translation, rotation, scale)
- hold the instance id (which is the object’s index) and is passed to the HLSL shader code (the usage will be explained in the HLSL post)
- hold a handle to the bottom level acceleration structure
//Build the instances
std::vector<D3D12_RAYTRACING_FALLBACK_INSTANCE_DESC> instanceDescArray;
for (int i = 0; i < objects.size(); i++) {
D3D12_RAYTRACING_INSTANCE_DESC instanceDesc = {};
SceneObject obj = objects[i];
Model* model = obj.model;
memcpy(instanceDesc.Transform, obj.getTransform3x4(), 12 * sizeof(FLOAT));
instanceDesc.InstanceID = i;
instanceDesc.AccelerationStructure = model->bottom_level_acceleration_structure);
...
}
...
instanceDescResource = AllocateCBV(instanceDescArray, ...);
...
//Get PreBuild information
m_dxrDevice->GetRaytracingAccelerationStructurePrebuildInfo(..., &top_pre_build_info);
...
//update the descriptor and make sure that the descriptor points to the instanceDescArray
top_acceleration_descriptor.pre_build = top_pre_build_info;
top_acceleration_descriptor.Inputs.InstanceDescs = instanceDescResource->GetGPUVirtualAddress();
...
//Build the Acceleration Structure with the command list
rtxCmdList->BuildRaytracingAccelerationStructure(&top_acceleration_descriptor...);Then, at the end, before executing the command list, and running the hlsl code, the top level acceleration structure is binded to the command list
commandList->SetComputeRootShaderResourceView(
GlobalRootSignatureParams::AccelerationStructureSlot,
m_topLevelAccelerationStructure->GetGPUVirtualAddress()
);
Well, that’s all I have for now. Hopefully more people are going to get into the awesome DXR API and build amazing applications with it!
Let me know if you have any questions!
Enjoy Reading This Article?
Here are some more articles you might like to read next: